Detect. Connect. Collect.
All work showcased below—including software development, AI training, system design, and visualizations—was completed by me.
OCELEX
Twenty day North Pacific cleanup operation led by our team, deploying AI driven reconnaissance drones, a primary collection vessel with dual support boats maintaining extended capture nets, and streamlined conveyor systems for continuous plastic recovery and processing.
Project Status – In Progress (Expected Completion: January 5, 2026)
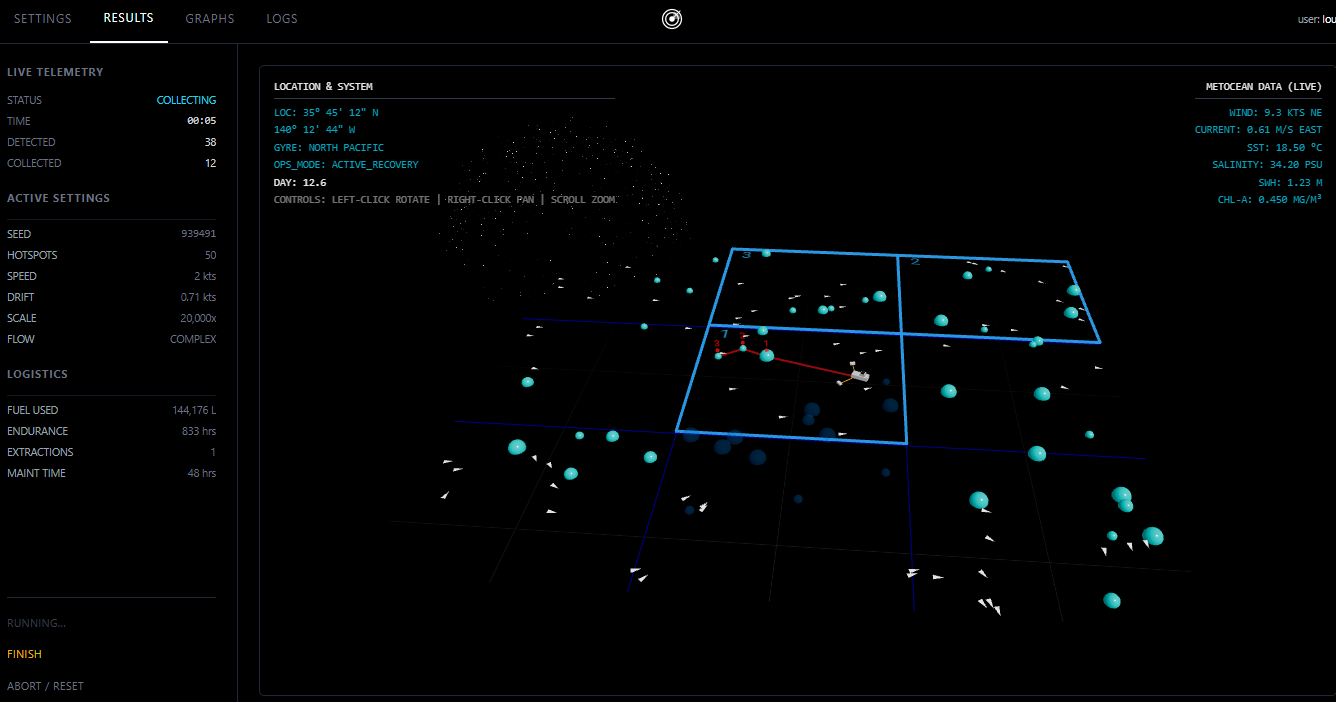
I’m currently leading the Locating Phase of the Extracting Engineering Systems group project, where we’re developing a complete process for removing ocean plastics. My role focuses on designing the UAV radar system to predict and track debris movement in real time.
So far, I’ve built a functional radar display system capable of mapping debris positions, and I’m now training a YOLOv8 model to detect plastics in the ocean using Gemini 2.5–generated images. I’m also integrating live CMEMS ocean current data to help guide the extraction boats toward plastic clusters dynamically, ensuring a coordinated and efficient cleanup process.
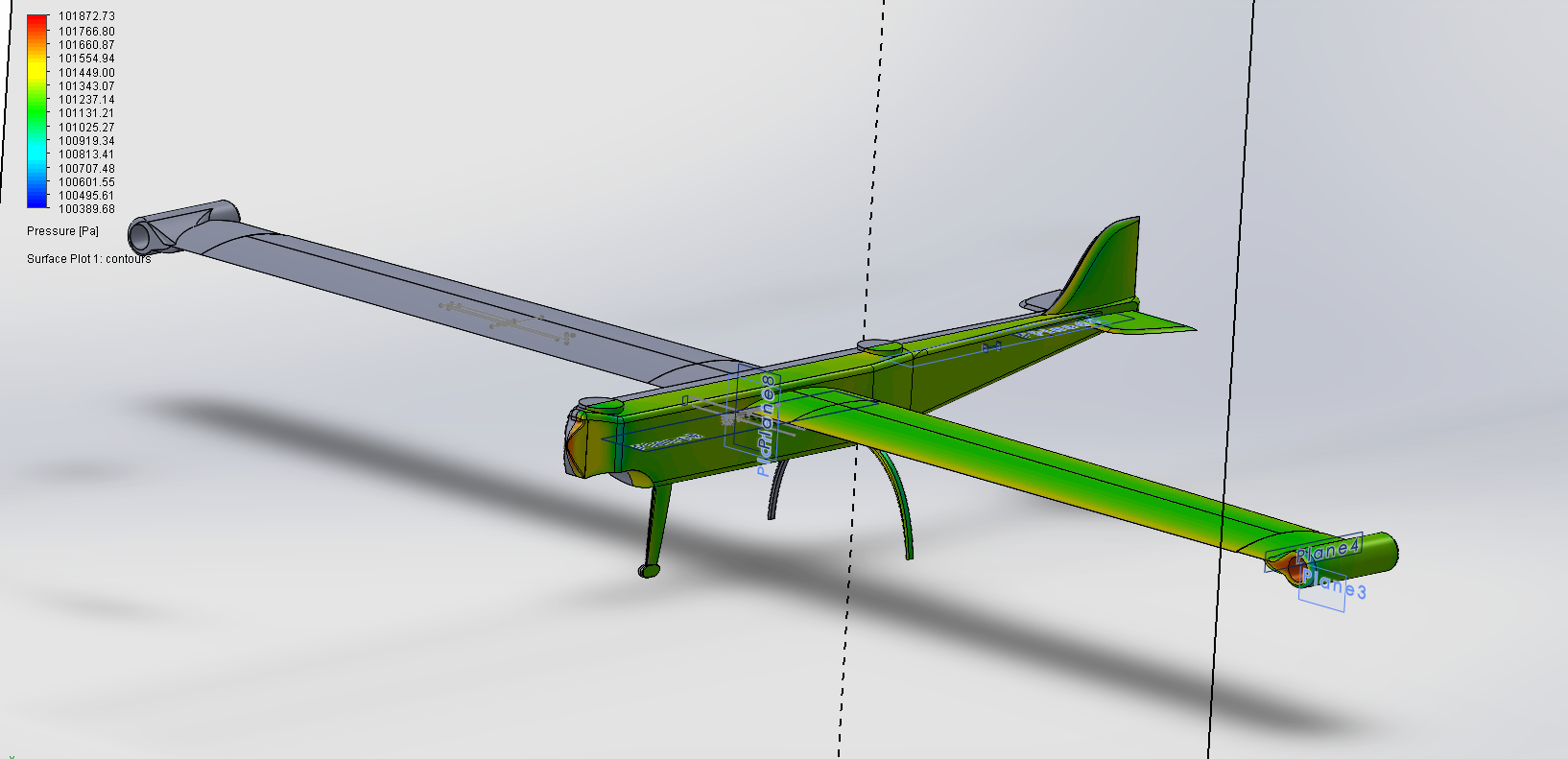
FRAME CREATION & PRESSURE SIMULATION
IOT Simulation
PROPELLER ANALYSIS
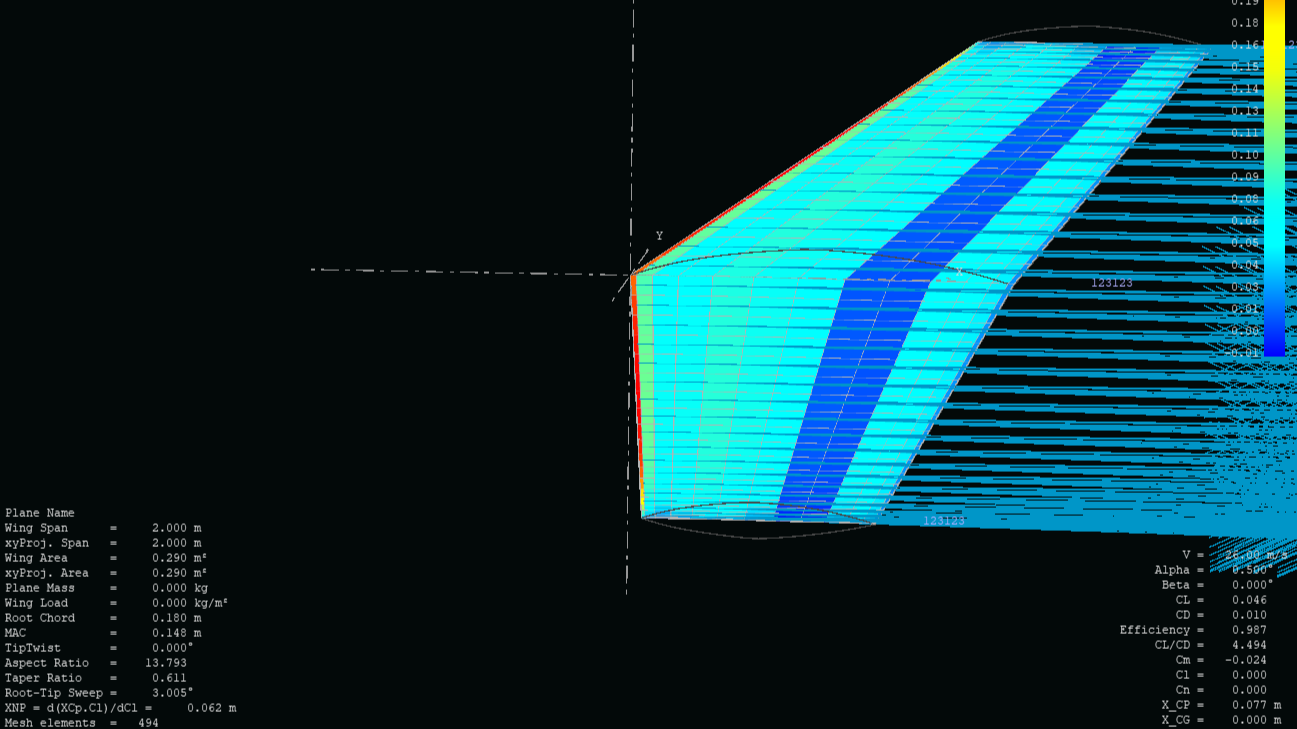
WING ANALYSIS
THROTTLE TILT


UAV Engineering & Design
AIoT & Automation

OCELEX Route Optimisation Application


Conveyor
ANALYSIS
AI TRAINING
Workings
EQUATIONS OF MOTION AND CONTROL
CMEMS Data
